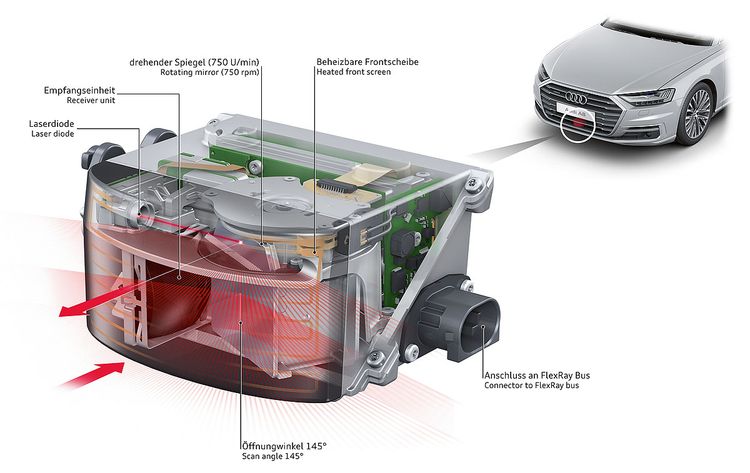
Dreidimensionaler Laserscanner von Valeo im Audi A8 als Voraussetzung für automatisches Autofahren ab Level 3.
Die möglichst lückenlose Abtastung des automobilen Umfelds ist eine Grundvoraussetzung für die Automatisierung des Fahrens. Im Grunde funktioniert das immer nach dem gleichen Prinzip: entweder passiv mit Kameras oder aktiv mit Wellen unterschiedlichster Frequenz, die von einem Sensor am Auto losgesendet und wieder aufgefangen werden. Kamerasysteme arbeiten im Zusammenhang mit der Elektronik wie das menschliche Auge und das Gehirn. Alle anderen Systeme sind im weitesten Sinn mit dem Orientierungssinn der Fledermäuse vergleichbar. Das eingefangene "Bild" ergibt sich aus der Rhythmik der ausgesendeten und wieder eingefangenen Wellen. Man kann mit Schallwellen, Radiowellen oder Lichtwellen arbeiten.
Ultraschall
Hier handelt es sich um Schallwellen oberhalb der menschlichen Hörschwelle, also jenseits von 20.000 Hertz. Das Prinzip beruht darauf, dass feste Körper die Wellen reflektieren, absorbieren, streuen oder auch durchlassen, darauf basieren die Ultraschallbilder in der Medizin. Bei entsprechend hohem Energieeinsatz kann man damit auch reinigen, bohren, schneiden und schweißen. Das wichtigste Einsatzgebiet im automobilen Bereich sind derzeit Parksensoren, auf der Grundlage eindimensionaler Distanzmessung. Vorteile liegen im geringen Preis und Energieverbrauch, sie funktionieren auch trotz Dunkelheit, Streulicht, Staubeinwirkung und Schmutz. Neue Entwicklungen in Richtung 3D-Ultraschall versprechen umfassende Vorteile gegenüber den nachfolgenden teureren Methoden, vor allem in Nahbereich.
Radar
Das Radarbild ergibt sich aus der Verarbeitung der Reflexionen von Radiowellen. Je nach Anwendungsbereich zwischen 0,5 und 300 Gigahertz, im Automobil haben sich zwei Frequenzen etabliert – 24 GHz für Heck und Seite und 77 Ghz im Frontbereich. Radar ist witterungsempfindlich, aber weniger stark als kamerabasierte Systeme.
Lidar
Das Lidar-Messverfahren (Light detection and ranging) bedient sich eines Laserscanners. Die Basis sind also Lichtwellen zwischen Ultraviolett, Infrarot und sichtbarem Licht. Mithilfe eines rotierenden Spiegels wird der Laserstrahl abgelenkt und leuchtet so das Sichtfeld des Sensors aus. Das Prinzip des 3D-Laserscanners ist schon länger bekannt. Die dreidimensionale Aufarbeitung der Lichtstrahlen ist aber im Automobilbereich eine besondere Herausforderung, da hier extreme Temperaturen und Vibrationen über ein ganzes Autoleben hinweg zu beherrschen sind.
Ein wesentlicher Vorteil ist die Kombination aus Wirkungsbreite, hoher Reichweite und Detailauflösung. Damit empfiehlt sich das Lidar-Prinzip trotz aller Schwierigkeiten im Detail als Voraussetzung für das automatische Autofahren von Level 3 (hochautomatisiert) aufwärts. Valeo (auch Ausrüster des Sensors im Audi A8, siehe Bild) sagt dazu Folgendes: Der Sensor teilt den Erfassungsbereich in über 2300 Messpunkte auf, die er bis zu 25-mal pro Sekunde abtastet. Dabei liefert er insgesamt 43.000 einzelne Abstandswerte pro Sekunde." Man verspricht auch, dass 2020 ein System serienreif sein wird, das nicht nur den Frontbereich abtastet, sondern auch ein komplettes 360-Grad-Bild rund um das Fahrzeug erfasst. Dabei möchte man auch ohne den potenziell störanfälligen drehenden Spiegel auskommen. Größtes Problem ist aufgrund der Lichtwellenbasis ähnlich wie bei Kameras die Allwettertauglichkeit, also die Verschmutzung des Sensors, weshalb man auch an Spritz-, Wisch und Heizsystemen für den Sensor arbeitet.
In der Regel werden also bei einem Auto mehrere unterschiedliche Sensortypen verwendet und die Daten dann zusammengeführt (Sensordatenfusion). (Rudolf Skarics, 29.10.2018)