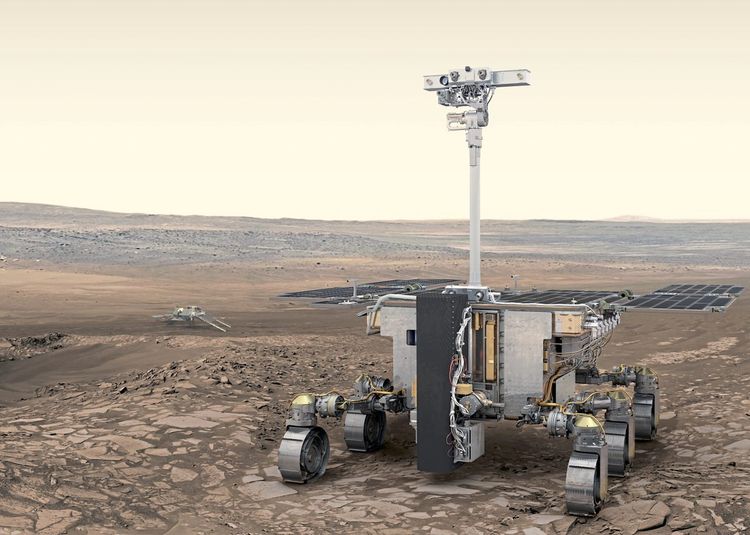
Der Lander Rosalind Franklin soll auf dem Mars nach organischen Spuren suchen. Derzeit wird der Roboter noch rigoros getestet.

So hatte man sich die Landung des Testmoduls Schiaparelli im Oktober 2016 vorgestellt, ...
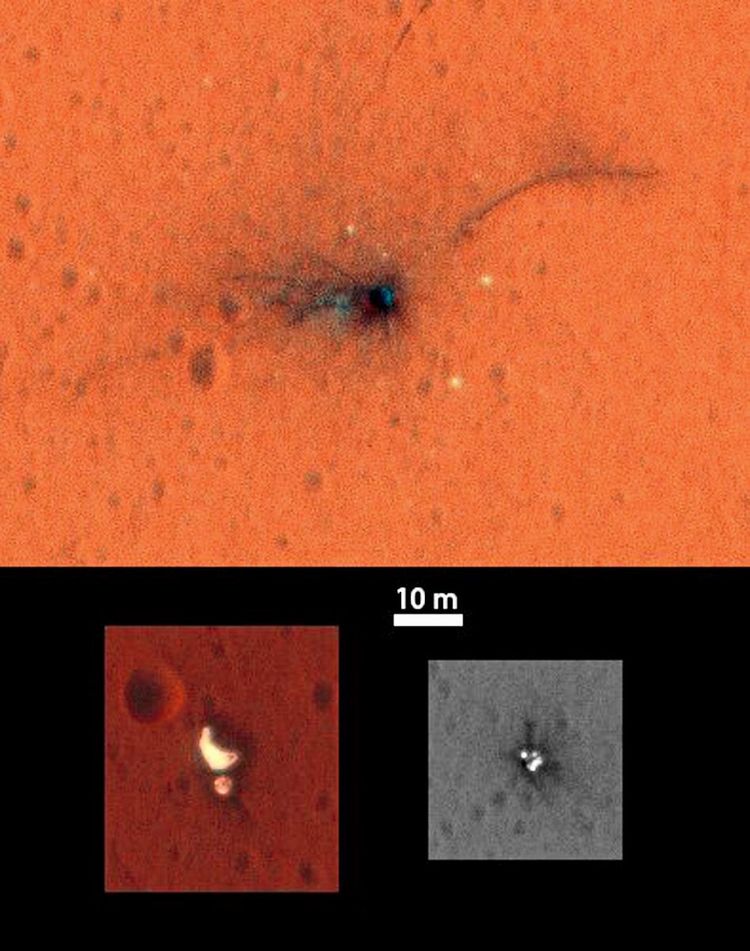
... doch daraus wurde nichts, wie diese Aufnahmen des Absturzortes zeigen.
Die Welt schielt auf den Nachbarn. Der Mars ist das Ziel zahlreicher geplanter Missionen, allein im kommenden Jahrzehnt wollen diverse Weltraumagenturen fünf Vehikel auf den Roten Planeten bringen. Eines davon soll aus Europa stammen: Die Europäische Weltraumorganisation Esa will mit der Mission Exomars im Juli 2020 einen Marsrover losschicken, die Landung ist für März 2021 geplant.
Die Vorbereitungen dafür laufen auf Hochtouren – für die Esa steht auch viel auf dem Spiel. Denn der erste Teil der Mission endete im Oktober 2016 mit einem Fiasko: Zwar konnte die Sonde Trace Gas Orbiter in eine Umlaufbahn um den Roten Planeten gebracht werden, die Testlandung mit dem kleinen Roboter Schiaparelli schlug jedoch fehl – er krachte wegen eines Softwarefehlers mit 540 km/h auf den Mars.
Sonde als Relaisstation
Die Landung des viel größeren Rovers samt seiner Landeplattform, die von der russischen Weltraumorganisation Roskosmos bereitgestellt wird, ist wesentlich schwieriger. Bei der Esa zeigt man sich aber zuversichtlich, dass die Probleme von 2016 vollständig behoben werden konnten. Um die reibungslose Kommunikation mit dem Marsroboter während und nach der Landung sicherzustellen, wird der Trace Gas Orbiter Mitte Juni in eine neue Umlaufbahn gebracht. Das ist nötig, damit er sich bei der Ankunft des Rovers in der richtigen Position befindet.
Die Hauptaufgabe des Orbiters ist zwar, die Zusammensetzung der Marsatmosphäre zu unter suchen, er soll aber auch als Relaisstation eingesetzt werden und Datenübertragungen zwischen Mars und Erde ermöglichen. Auch die US-Weltraumbehörde Nasa nutzt ihn als Datenübermittler.
Steuerung in Turin
Die Manöver der Sonde und die Landung des Rovers werden vom Raumflugkontrollzentrum in Darmstadt aus gesteuert. Ende Mai wurde in Turin ein neues Esa-Kontrollzentrum eröffnet, das danach übernehmen soll: Von Turin aus sollen alle Aktivitäten des Rovers auf der Marsoberfläche gelenkt werden.
Der Roboter, der zu Ehren der britischen Biochemikerin Rosalind Franklin benannt wurde, soll Analysen der Marsoberfläche vornehmen, bis zu zwei Meter in die Tiefe bohren und die Proben auf organische Moleküle untersuchen. Die Mission ist nicht darauf ausgelegt, große Distanzen zurückzulegen, deshalb soll der Rosalind-Franklin-Rover gleich in einem möglichst vielversprechenden Gebiet landen und vor Ort forschen.
Die endgültige Entscheidung für einen Landeplatz soll in den kommenden Wochen fallen, als Favorit gilt aber seit längerem die Ebene Oxia Planum. Das Terrain scheint wissenschaftlich interessant zu sein und verspricht dank der Ausdehnung und Tieflage eine verhältnismäßig "einfache" Landung. (David Rennert, 6.6.2019)